有款游戏,想必朋友们都不陌生。
俗话说得好:“ 流水的榜单,铁打的 给他爱 ”。
2013 年发售至今,各大游戏平台的动作冒险类游戏前几名都少不了它。
即便是把所有任务都过完了,依然会偶尔点开游戏,在圣安地列斯里飙飙车。
但是,你有用过第一人称视角玩这款游戏吗?
游戏的默认视角是第三人称,而且第三人称玩起来也更符合键鼠的操作习惯。
但咱心里都清楚,想要更加真实的游戏体验还是得第一人称。
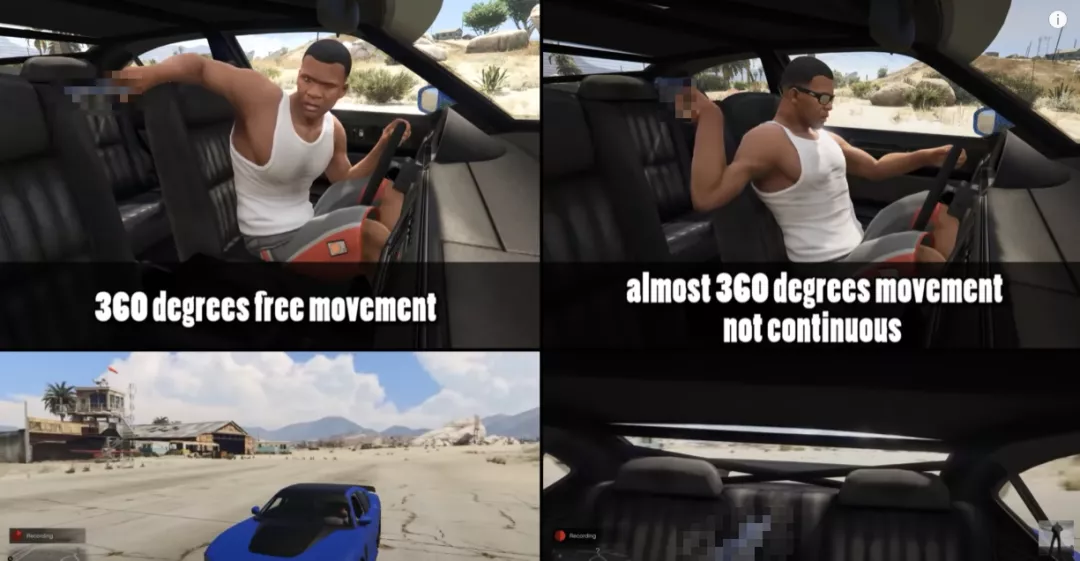
而大家之所以不选第一人称来玩,也是因为这个视角下的 Bug 又多又离谱,关键问题是第一视角开车真的是折磨。
在这款游戏里车开的不舒服,就好比是吃火锅毛肚没有麻酱,瞬间失去了灵魂。
所以今天,小编给朋友们带来一个新玩法。
想必大家跟我一样,就想过一把第一人称视角开车的瘾?

正好智己汽车准备在杭州进行一段 IM AD 智能驾驶系统的路测。
在我的劝说(忽悠 )下,他们同意用第一人称的风格来开展这次测试。
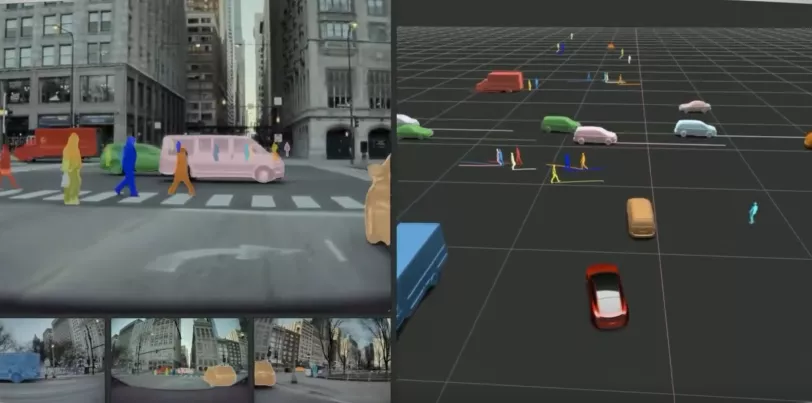
所以为了深度还原游戏场景,鲫鱼给司机装上 Go Pro,带了一名摄影师,在车上装了四个相机,完美复原游戏里第一视角的观感。

还用实际的测试路段替换了游戏里的地图,在画面上展现了时间、天气、路况等测试信息。
接下来,就给大家来一波给他爱风格的智能驾驶沉浸式体验。
X.PiN WARNING :
司机师傅是经过专业培训的安全驾驶员,并且整个测试过程中双手时刻轻扶方向盘。
这款车是测试版工程样车,且在 ODD 智能驾驶运行区域内测试。
最关键的是,车主们请不要模仿!不要模仿!不要模仿!
话不多说,系好安全带,开始体验。

刚上路的时候,鲫鱼心里还是有点担心,毕竟是上高速,有段路限速还是 100 公里。
又是周五下班的点,高速上,车也不少。
好巧不巧,刚上道就碰到了旁边车“ 加塞 ”。
在我们驶入 Y 形匝道之前,旁边有辆黑车硬往前面插,而且距离我们很近。

IM AD 很快就预测出黑车的加塞意图,放低速度并预留出足够的安全距离,让它先过。
之后精准地识别出匝道线,平顺地转入匝道口。
虽然这波操作很不“ 游戏 ”,但鲫鱼喜欢这种绅士风范的稳重操作。
其实因为有高精地图的加持,智己早在距离匝道口不远处就提前打好了转向灯。
高精地图示意图 ▼
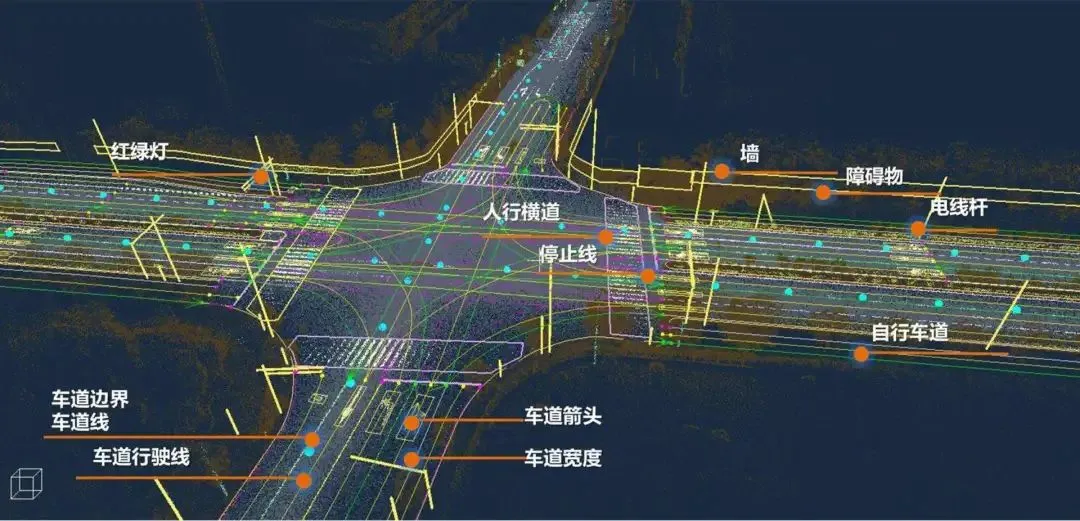
既提醒后车注意,也避免了匝道口车辆过多可能错失变道时机的风险。
但这个高精地图的威力还不止于此。
比如面前这个大曲率的弯道,高精地图可以提前把这个弯道形状告诉 IM AD 智能驾驶系统。

应该把速度减到多少,方向盘打到多少才能转过这个弯,这些事情都提前计算好。
除了大曲率的弯道,咱再来换个更严苛的场景。
智己汽车在之前的成都路测时,还碰到一段魔鬼级考验的 U 形弯道,智己汽车不仅自己十分顺滑的通过,行驶速度也丝毫没有影响后续车辆的通行。
话说,为什么 U 形弯道是魔鬼级的。

对于智能驾驶系统来说,近距离物体的探测大多依靠视觉,但视觉往往存在一定的滞后性。
说白了就是摄像头看到障碍然后让系统做出转向动作的这会时间,可能就已经转不过去了。
而在 U 形弯里,一辆车接着一辆车,大家的速度也都不低,你要是忽然卡住,很有可能会被后车追尾。
这时候就需要高精地图的辅助。
在进弯之前提前算好速度和方向盘转角,避免视觉识别滞后性带来的智能驾驶系统卡壳,更不影响前后车的通行速度。
回到杭州这边,我们体验完 IM AD 的温文尔雅,也是时候感受它“ 刺激 ”的一面——超车。

IM AD 如果识别到另外一条车道十分通畅,自己前车行驶速度又十分缓慢的情况下,就会做出变道超车的决策。
转向灯一闪,丝滑转动方向盘的同时,循序渐进的加速,最后平稳的变道超车。
并且,当右侧车辆是货车或大型工程车辆的时候,IM AD 会在并排前进时有一个远离它的动作,确保安全,以防万一。

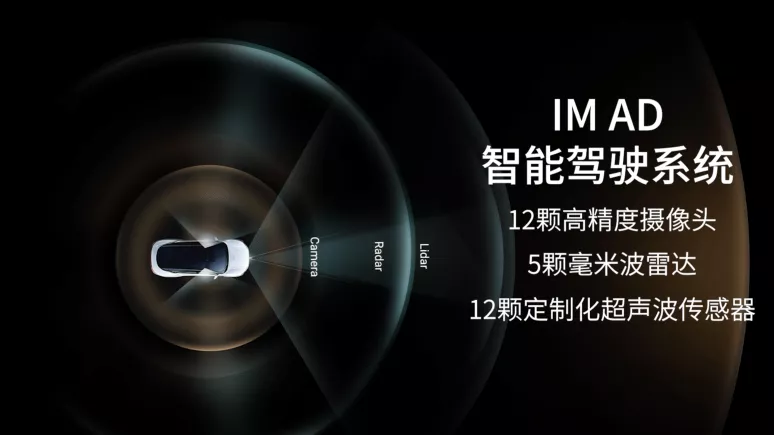
而 IM AD 之所以能像老司机一样完成上述一系列超车变道动作,还得益于智己汽车身上那 32 双“ 眼睛 ”。
12 颗高精度摄像头、5 颗毫米波雷达、12 颗定制化超声波传感器,再配上高精地图、高精惯导和 V2X 车端技术,赋予了 IM AD 360 度全方位的感知能力。
有车加塞,它可以做到 “ 变速不变道 ”,碰到大曲率弯道,也可以丝滑柔顺的通过。
除了稳重以外,IM AD 给你带来的乘坐体验也一点不少,超车时果断利落,避障时也快速准确。
用游戏里的话来说,Hi bro….Nice car.
那么智己汽车 IM AD 智能驾驶系统还有哪些 Nice 的地方?
提问解答部分:
鲫鱼拉来了 IM AD 智能驾驶系统的一名工程师,好好跟大家盘盘智能驾驶的那些事。
刚上来的问题就很直接!
Q:智能驾驶最近几年总是出事,从专业的角度来看,你觉得事故原因有哪些?
A:首先一点是大家对于智能驾驶系统的认知有偏差,过度信任智能驾驶系统,出现了一些危险驾驶行为,导致事故发生。

其次,智能驾驶企业或媒体对智能驾驶的过度宣传也是造成消费者认知偏差的一个原因。
为此,我们计划为 IM AD 智能驾驶系统添加一个信任增强模式。
它会以 WIFI 信号的样式展示当前智能驾驶系统的置信度,当信号不是满格的时候,证明这个场景下智能驾驶系统不能完全接管,就会提醒驾驶者注意随时接管。

驾驶者也可以根据 “ WiFi 的信号强度 ” 自行判断是否接管车辆。
Q:那是否存在一些专业技术上的原因导致智能驾驶事故频发呢?因为之前大多数事故,都是高速上撞了路障车等应急响应车辆,这又是为什么?
A:技术本身的原因确实也有。
对于目前走雷达+视觉路线的智能驾驶系统,它们两的决策逻辑一般是视觉站绝对主导权,而且目前的雷达识别还存在一些先天性的不足。
比如对于缓慢行驶物体、静止物体等,是毫米波雷达的盲区,所以需要视觉快速检测物体。
但因为视觉算法方面考虑的场景不够全面,就出现了视觉识别的滞后性。
比如高速行驶的车辆主体难以识别静止的工程维修车辆或应急车辆,等到系统识别到的时候再减速就有点晚了。
所以遇到这种情况系统会不断给驾驶员提醒接管,但有些驾驶员它可能不把这个当回事,最终就会酿成事故。
所以无论是不是智能驾驶汽车,开车的时候都一定要握紧方向盘。

Q:那您上面说的雷达+视觉的智能驾驶路线和那种纯视觉的路线,您觉得哪个更有优势?
A:目前或者说在未来几年,主流的应该依然是雷达+视觉的路线,它相较于纯视觉路线其实多了一重保障,在视觉识别有滞后时可以用雷达来快速决策。
并且纯视觉路线需要大量训练数据,成本较高。
高精地图+雷达+视觉的融合策略,将会是未来几年智能驾驶路线的主流。
Q:那国外和国内的道路训练出来智能驾驶系统差别大不大?智能驾驶的本土化目前又做得怎么样呢?
A:当然是有差别,训练数据的来源越多越好,无论是国内还是国外我们都希望能训练到,未来也都会去训练。
不同的道路训练出来的模型会有细微的差别,比如国外的道路,路宽人少,它们的智能驾驶系统如果忽然放到北京下班晚高峰,一下子确实适应不过来。

但对于配备适时学习功能的自动驾驶系统,它也会很快的适应和学习新环境。
而本土化这块是国内自动驾驶企业的一直以来的发展重点,目前本土化最直观的体验还是高精地图,无论是套用别家的高精地图还是像我们一样自己研发高精地图,它都是为国内道路量身打造的。

纵然智己汽车已经具备了实现更高级别智能驾驶的能力,但并没有把时间精力浪费的那些花里胡哨的新功能,而是一直在把 L2 的体验和安全做到极致,毕竟这是我们目前用的最多也是担心最多的功能。
工程师的一段话也让我印象深刻:
“ 很多人说智能驾驶行业是新的风口,甚至有人说它是汽车工业的又一次革命。但我认为它是一块烫手的山芋,短短几年时间里的确迎来了突飞猛进的跨越,但在这过程中暴露出来的问题也越来越多,所以我认为自动驾驶行业在不断探索新方向的同时,其实更重要的是静下心来做好现在。”

我相信对于智能驾驶车主或准车主来说,最后这句 “ 静下心来做好现在 ” 的确是说到心里了。
毕竟大家对于智能驾驶最高的期望,永远都是 “ 安全 ” 两个字。
本站部分文章来自互联网,文章版权归原作者所有。如有疑问请联系QQ:3164780!